
|
|
El terreno es un rectángulo con zonas de salida como aparece en la figura.. Existen cuatro canastas (una en cada esquina).. Sobre el terreno se depositan bolas de dos colores (rojo y negro).. Cada equipo debe encestar las bolas rojas en una canasta diferente. Las bolas negras deben ser encestadas en las canastas donde el equipo contrario encesta las rojas.. Cada bola roja en canasta propia suma un punto. Cada bola negra en canasta propia resta un punto.. El que tenga mas puntos se erige vencedor de la contienda. |
 |

|
Ligre, fue el primer participante español en Eurobot, su nombre designa al animal mitad leon mitad tigre. Fue desarrollado por estudiantes de 4º curso de Ingeniería de Telecomunicación de la Universidad de Alcalá, bajo la dirección de Julio Pastor Mendoza, profesor del Departamento de Electrónica en la mencionada universidad.
|
 |
|
| RCA Roboterclub Aachen | ||||
| BLIBOT | ||||
| Austrobot | Ae²m | |||
| ULG | ||||
| Robotic UQAM | ||||
| DTUTT Robotics | ||||
| UAH | ||||
| IUT Ville d'Avray | Minitech | |||
| Tamper Univ. Of Technology | ||||
| Bursting Balloons | ||||
| Universia Catania | ||||
| Team NTNU | ||||
| MINHO | ||||
| Cambridge | ||||
| Mart | Short Circuits | Sirael | ||
| CEPTA | HESSO-EIVD | HSR | ||
| Paises que organizaron copas nacionales de acceso. | ||||
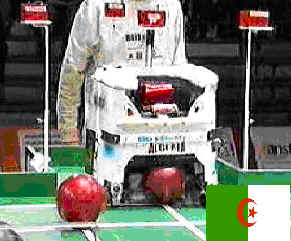
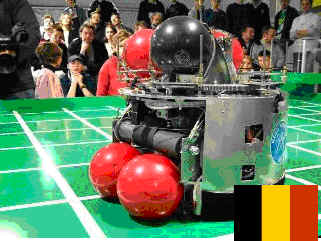
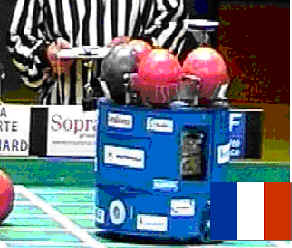
A continuación algunas fotos de los participantes
 |  |
 |  |
 |  |
CLASIFICACIÓN: Superada en cuarta posición
OCTAVOS DE FINAL: Victoria frente a Dinamarca
CUARTOS DE FINAL: Derrota frente a Universidad de París X de Nanterre que fue el ganador de EUROBOT 2002
CLASIFICACIÖN FINAL: Sexta posición
 |  |
| Ligre en acción | El ganador de la Universidad de Paris |
| EURO02_Clasificacion.avi | 15.9MB | ||
| EURO02_Ligre_Individual.avi | 8.4MB | ||
| EURO02_Ligre_vs_ParisX.avi | 5.1MB | ||
| EURO02_Final.avi | 11.9MB |
